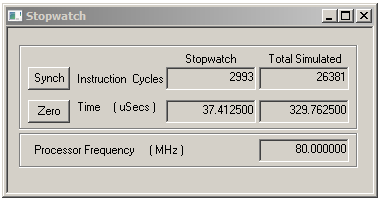
I also did another test to compare the speed of the two chips. I wrote the Kalman filter code that I will use in the quadcopter and ran it in MPLABSIM for the PIC32 and DsPIC both running at 80Mhz. I go he following results:


As you can see from the Stopwatch column the PIC32 uses less than half the instruction cycles for the same code of the DsPIC. Also the PIC32 ran the same code 5 times faster than the DsPIC. Speed can be important if I want to have high update rates on the PID loop so from all this I chose to use the PIC32 on my quadcopter controller.
Andrew
{kind=link}